
Wir sind immer noch im Kapitel deformierbare Körper. Jetzt wenden wir uns den „Festkörpern” zu. Bei Festkörpern ist es so, dass äußere Kräfte, die an einem Festkörper angreifen dazu führen, dass sich dieser verformt. Die äußeren Kräfte greifen an der Oberfläche des Körpers an und bewirken, dass er deformiert wird. Man spricht dabei nicht von Volumenkräften, wie zum Beispiel die Schwerkraft, die ins Innere eines Körpers wirkt. Auch noch von magnetischen Kräften, die auf ferromagnetische Werkstoffe im Innern hineinwirken. Bei den elastischen oder auch plastischen Verformungen von festen Körpern betrachten wir nur Oberflächenkräfte.
Daher ist es sehr wichtig, diese Kräfte auf eine Flächeneinheit zu beziehen. Eine solche Kraft pro Fläche könnte beispielsweise als Druck aufgefasst werden. Aber auch hierbei kann es um Kräfte gehen, die schräg oder sogar tangential an die Oberfläche eines Körpers angreifen. Daher werden die Kräfte nicht einfach nur als Drücke bezeichnet. Denn eine Kraft kann sich auch als Zugkraft erweisen. Aber um keine Verwirrungen hervorzurufen, verwendet man generell den Ausdruck „Spannung”.
Spannung =
Eine Kraft wird aber nicht nur senkrecht auf eine Fläche wirken. Spannungen lassen sich je nach Wirkungsweise unterteilen in Normalspannungen und Tangentialspannungen. Unter Normalspannungen versteht man solche, bei der die Kraft senkrecht auf die jeweilige Oberfläche wirkt. Bei Tangentialspannungen dagegen wird die äußere Kraft tangential angreifen. Solche Spannungen nennt man auch „Scherspannungen”. Derartige Spannungen werden üblicherweise mit τ (tau) bezeichnet.
Bei der Normalspannung unterscheidet man nochmals zwischen Zug- und
Druckspannung. Die Zugspannung wir mit σ (sigma)
bezeichnet und die Druckspannung mit p. Alle diese Größen
haben alle die gleiche Dimension, nämlich
Jetzt werden wir kurz betrachten, auf welche Weise verschiedene Körper deformiert werden können. Anschließend fragen wir nach der Ursache von solchen Deformationen. Und dort spielen diese Spannungen eine wesentliche Rolle mehr. Ein wichtiger Punkt ist nämlich die Frage, wie hängt die Größe der Spannung mit der Stärke der Deformation zusammen? Das führt letztlich zu den wichtigen Gleichungen in der Elastizitätslehre. Doch zunächst sprechen wir allgemein über Deformationen.
„Deformationen” lassen sich auf zweierlei Weise charakterisieren. Die erste Möglichkeit ist, ein fester Körper deformiert sich so, dass sich sein Volumen ändert aber seine Gestalt erhalten bleibt. Zum Beispiel ein Würfel, der von allen Seiten gleichmäßig etwas zusammengedrückt wird. Die Volumenänderung ergibt sich dann aus dem Endvolumen minus das Anfangsvolumen:

Wenn der Würfel durch eine äußere Druckspannung allseitig zusammengedrückt wird, wird das Volumen zwangsläufig kleiner werden. Somit wird dieses ΔV negativ sein. Dazu lässt sich auch noch die relative Volumenänderung definieren:
ϕ ist die relative Volumenänderung
Die relative Volumenänderung ist eine prozentuelle Änderung des Volumens durch eine äußere Kraftwirkung.
Als zweite Möglichkeit kann man die Gestalt des Körpers verändern, ohne
sein Volumen zu ändern. Nehmen wir wieder diesen Würfel. Diesmal ist er auf einem
Untergrund fixiert. Und an der Oberfläche wirkt tangential eine Kraft
 in seitliche Richtung, man spricht
auch von einer „Scherkraft”. Der Körper verformt sich dann zu einem
Parallelogramm, wobei das Volumen erhalten bleibt.
in seitliche Richtung, man spricht
auch von einer „Scherkraft”. Der Körper verformt sich dann zu einem
Parallelogramm, wobei das Volumen erhalten bleibt.
Die Verzerrung der senkrechten Flächen zur Seite hin ergibt den Scherwinkel γ. Somit beschreibt dieser Scherwinkel die Gestaltänderung. In vielen Fällen wird aber beides zugleich auftreten, eine Volumenänderung und eine Gestaltänderung. Das passiert beispielsweise dann, wenn man einen länglichen Stab einseitig belastet, indem man ihn dehnt oder staucht.
Hierzu denken wir uns einen Stab, der an einer Wand befestigt ist. Und jetzt greift an der
Stirnfläche eine Kraft an, die
den Stab in die Länge zieht. Die ursprüngliche Länge
L₀ verändert sich zur gedehnten Länge
L. Die Änderung der Länge wird durch das
ΔL definiert. Anderseits verändert sich auch der
Querschnitt. Der Ausgangsdurchmesser d₀
verändert sich zum gedehnten Durchmesser d, indem er schlanker
wird. Man nennt so etwas die „Querkontraktion”.
Die Querkontraktion hängt mit der Längenänderung zusammen. In diesem
Zusammenhang werden wir zwei verschiedene Größen betrachten. Einerseits die
Größe

Die relative Längenänderung ist eine prozentuelle Änderung der Länge durch eine äußere Kraftwirkung. Die gleiche Kraft führt bei verschiedenen Stäben mit unterschiedlichen Ausgangslängen zu unterschiedlichen absoluten Ausdehnungen ΔL. Aber die relative Längenänderung wird in diesen Fällen immer die Gleiche sein.
Und als zweite Größe ist die relative Querkontraktion sehr wichtig, die wie folgt definiert wird:
Denn wenn sich die Länge ändert und größer wird, dann wird zugleich der Querschnitt geringer werden. Diese relative Querkontraktion führt uns zu einer weiteren wichtigen Größe, nämlich zu der berühmten Poisson-Zahl.
Es erhebt sich nämlich die Frage, wie diese beiden relativen Änderungen miteinander zusammenhängen? Die Auswirkungen hängen natürlich auch vom Werkstoff des Körpers ab.
Deshalb definiert man sich zusätzlich eine Größe μ,
bei der es sich wieder um eine dimensionslose Zahl handelt.
Die Poisson-Zahl wird definiert als:
Die Poisson-Zahl ist charakteristisch für das Verhalten eines verformbaren Festkörpers bei einseitiger Dehnung oder Stauchung. Da die Poisson-Zahl das Verhältnis der relativen Querdimensionsänderung zur relativen Längsdimensionsänderung angibt, erhält man eine Aussage darüber, wie sehr sich das Volumen dieses einseitig gedehnten Stabes ändern wird. Das Verhältnis wird logischerweise nicht konstant bleiben.
Wenn man das durchrechnet, lässt sich die relative Volumenänderung wie folgt darstellen:

ϕ ist die relative Volumenänderung (s.o.)
Jetzt interessiert uns noch, wie man die Ursachen dieser Verzerrungen beschreiben kann, oder wie sie miteinander in Beziehung stehen. Die Frage ist daher, welche Spannungen bewirken welche Verzerrungen? Und dazu eignet sich besonders gut das sogenannte Spannungs-Dehnungsdiagramm. Um sich das anschaulich vorzustellen, denken wir uns einen länglichen Stab, der durch die Wirkung einer in der Querschnittsfläche angreifenden Kraft ausgedehnt wird. Eine solche Betrachtungsweise ist immer der Ausgangspunkt in der Elastizitätslehre.
Es gibt einen wesentlichen Unterschied zwischen elastischen und plastischen Verformungen. Bei einer elastischen Verformung kehrt der Körper wieder in seine Ausgangssituation zurück. Bei einer plastischen Verformung bleibt der Körper im gedehnten Zustand, auch wenn keine Kraft mehr wirkt. Im Extremfall, wenn die Elastizitätsgrenze überschritten ist, kann es sogar zum Bruch kommen.
Grundsätzlich haben wir im „Spannungs-Dehnungs-Diagramm” zunächst einen Bereich, in welchem der Körper proportional gedehnt wird, nämlich der Proportionalitätsbereich. Und der geht linear bis zur Proportionalitätsgrenze. Dann schließt sich ein nicht linearer Bereich an, der aber trotzdem noch elastisch ist. Der Körper wird sich bei Nachlassen der Kraft noch zurückbilden. An dieser Stelle befindet sich die Fließgrenze. Jenseits dieser Grenze beginnt das Material zu fließen, und es gelangt nicht mehr in seine ursprüngliche Situation zurück. Bis es dann letztlich bei der Bruchgrenze zerreißt.
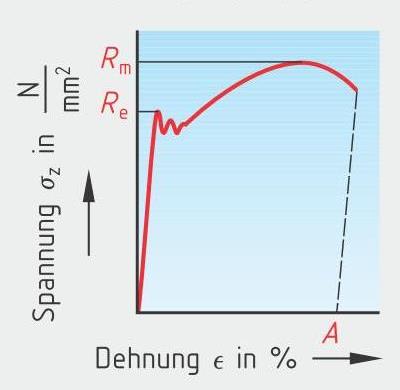
Abb. 1: Spannung-Dehnungsdiagramm „mit” ausgepägter Streckgrenze
In unserer Betrachtung beschränken wir uns hauptsächlich auf den Proportionalitätsbereich. Und wie nicht anders zu erwarten, gibt es eine proportionale Beziehung. Und zwar, dass die relative Längenänderung proportional zur Zugspannung ist. Wobei der Proportionalitätsfaktor vom Material abhängt:
ε ist die relative Längenänderung in
% (s.o.)
E ist das Elastizitätsmodul des jeweiligen Werkstoffs
(hier das Dehnungsmodul)
σz ist die Zugspannung
Das bezeichnet man auch als das Hookesche Gesetz.
Je nach Material gibt es unterschiedliche Dehnungsmoduln. Je größer dieser Modul wird, desto geringer wird die Längenänderung bei einer bestimmten Zugspannung. Die Einheit von diesem E-Modul ist:
In Tabellenbüchern für den Maschinenbau findet man eher die Einheit [N /mm²], mit entsprechend höherem Umrechnungsfaktor. Zum Beispiel beträgt der E-Modul bei Stahl 210.000 N/mm² und bei Aluminium 70.000 N/mm².
⇦ Kapitel Kapitel ⇨