
– Teil 2 und 3
Nun erhebt sich die Frage, welche Umstände uns eine veränderte Sicht von Raum und Zeit aufzwingen? Denn wenn die neue Sichtweise den Naturerscheinungen nicht widerspricht, eröffnet sich die Möglichkeit, Beziehungen eindeutig zu definieren. Bevor Minkowski darauf einging, stellte er eine wichtige Bemerkung voran.
Wenn Raum und Zeit eine Erweiterung erfahren haben, so entspricht einem ruhenden
substanziellen Punkt als Weltlinie eine zur
Setzen wir einen beliebigen „Weltpunkt”
Hierzu führte Minkowski folgendes Axiom ein:
Die in einem beliebigen Weltpunkt vorhandene Substanz kann stets bei geeigneter
Festsetzung von Raum und Zeit als ruhend aufgefasst werden.
Das Axiom besagt, dass in jedem Weltpunkt stets der Ausdruck

... Gültigkeit hat. Oder mit anderen Worten, jede Geschwindigkeit v ist stets kleiner als die Lichtgeschwindigkeit c. Bezogen auf alle substanziellen Geschwindigkeiten würde c als obere Grenze bestehen und hierin die tiefe Bedeutung der Größe c liegen.
Nach Minkowski scheint dieses Axiom auf den ersten Blick etwas Unbefriedigendes zu beinhalten. Er gibt zu bedenken, dass eine modifizierte Mechanik vonnöten ist, was bedeutet, dass in obiger Differentialgleichung zweiten Grades die Quadratwurzel mit eingeht. Dies sei notwendig, damit auch Fälle von Überlichtgeschwindigkeit eine Rolle spielen können, so wie es auch in der Geometrie „Figuren” mit imaginären Koordinaten gibt.
Ausschlaggebend für die Annahme, dass sich die Gruppe Gc so verhält, kommt daher, weil die Differentialgleichung diesen Aspekt der Ausbreitung von Lichtwellen im leeren Raum beinhaltet. Andererseits macht der Begriff „starrer Körper” nur in einer Mechanik mit der Gruppe G∞ einen Sinn.
Minkowski schlussfolgerte, dass wenn man beispielsweise die Gruppe
Gc betrachtet und es gäbe es starre Körper,
man erkennen könnte, dass durch die zwei zu den beiden Gruppen
Gc und G∞
gehörenden hyperboloidischen Schalen nur „eine”
Alle Bemühungen in diese Richtung, insbesondere der Versuch von Michelson, zeigten jedoch ein negatives Ergebnis. Um eine Erklärung dafür zu finden, entwickelte H.A. Lorentz eine Hypothese, deren Erfolg in der Invarianz (Unveränderlichkeit) der Betrachtung für die Gruppe Gc zu finden ist. Nach Lorentz soll jeder Körper, der in Bewegung ist, in Richtung der Bewegung eine Verkürzung erfahren, und zwar bei einer Geschwindigkeit v im Verhältnis
Diese Hypothese klang für Minkowski äußerst phantastisch. Denn die Kontraktion sei nicht eine Folge von Widerständen im Äther, so wie man sich das All ursprünglich vorstellte, sondern ein Glücksfall, quasi als Begleitumstand der Bewegung zu sehen.
Minkowski wollte nun an einer Grafik veranschaulichen, dass die Hypothese von Lorentz völlig äquivalent mit Einsteins Aufsatz über die Auffassung von Raum und Zeit ist, wodurch sie viel verständlicher wird.
Der Einfachheit halber trennen wir die Dimensionen y
und z gedanklich ab, und denken uns nur mehr eine räumlich
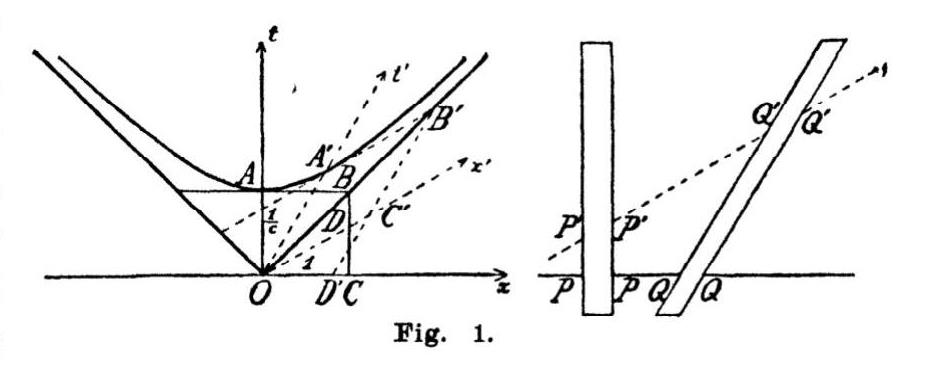
Ist der Abschnitt OA' parallel zum zweiten Streifen, so
können wir t' als Zeit und x' als
Raumkoordinate einführen. Und es erscheint dann der zweite Körper als ruhend,
der erste dagegen als gleichförmig bewegt. Des Weiteren nehmen wir an, dass der erste
Körper im Ruhezustand die Länge l hat, d.h. der
Querschnitt PP des ersten Streifens auf der
Durch diese zwei Körper werden zwei gleiche Lorentzsche Elektronen abgebildet,
ein ruhendes und ein gleichförmig bewegtes. Hält man aber an den
ursprünglichen Koordinaten
Und genau das sei der Sinn der Lorentzschen Hypothese, bezüglich der Kontraktion
der Elektronen bei Bewegung. Fassen wir andererseits das zweite Elektron als ruhend auf,
übernehmen also das Bezugssystem
Entsprechend obiger Abbildung erhält folgende Beziehung:

Lorentz bezeichnete in seiner Abhandlung die Verbindung t' von x und t als Ortszeit des gleichförmig bewegten Elektrons und benutze eine physikalische Konstruktion dieses Begriffs zum besseren Verständnis der Kontraktionshypothese. Jedoch zu erkennen, dass die Zeit des einen betrachteten Elektrons dem des anderen gleicht, also t und t' gleichzusetzen ist, sei erst ein Verdienst von A. Einstein gewesen.
Damit war der Begriff „Zeit” durch die Darstellungen als eine eindeutige
Größe festgelegt worden. An dem Begriff des „Raums” rüttelten
weder Einstein noch Lorentz vielleicht auch deshalb nicht, weil bei der oben
angeführten Transformation, bei der die
Nach dem nun zwingend notwendigen erlangten Verständnis der Gruppe
Gc erschien Minkowski das Wort
„Relativitätspostulat” für die Forderung einer
Unveränderlichkeit der Gruppe Gc nicht
ausreichend. Das würde dem Sinn nach bedeuten, dass durch die Erscheinungen in
Raum und Zeit nur eine
Durch das neu definierte Weltpostulat wird es nach Minkowskis Ansicht
möglich, die vier Bestimmungsstücke
Vor allem wird deutlich, was es mit dem Begriff Beschleunigung auf sich hat.
Minkowski bediente sich hierzu einer geometrischen Ausdrucksweise, die sich
nach seinen Worten anbietet, wenn man im Tripel, also dort, wo die Koordinatenpunkte
Der Kegel, definiert als

... und mit dem Punkt O als dessen Spitze (siehe Abb. 2), besteht aus
zwei Teilbereichen. Der eine Bereich mit den Werten Nullpunkt
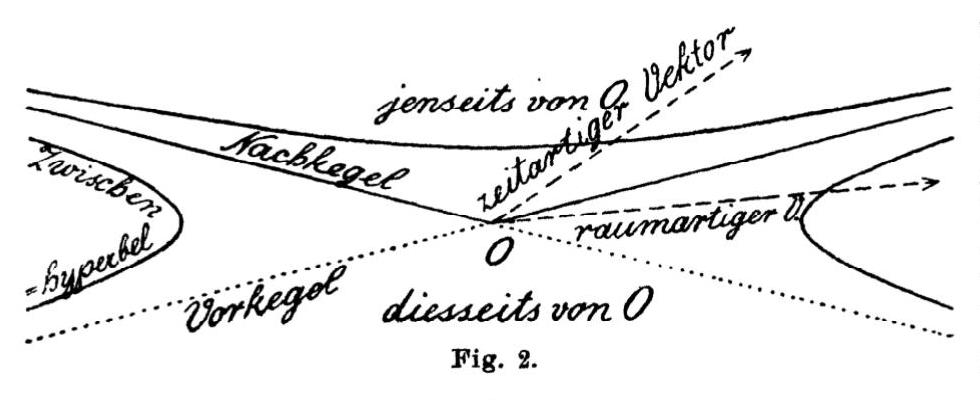
Den ersten, uns zugewandten Bereich, hatte Minkowski als „Vorkegel” bezeichnet, der aus allen Weltpunkten bestehen soll, die Licht „in Richtung O senden”. Der zweite, von uns weggewandte Bereich, bezeichnete er als „Nachkegel”, der seinerseits aus allen Weltpunkten besteht, die Licht „von O ausgehend” empfangen. Die vom Vorkegel eingegrenzte Fläche bezeichnete Minkowski als „diesseits von O” und die Fläche des Nachkegels als „jenseits von O”. Jenseits von O entspräche dann der weiter oben betrachteten hyperboloidischen Schale:

Der Bereich zwischen den Kegeln wird eingegrenzt von den einschaligen hyperboloidischen Verläufen

... und beinhaltet alle konstanten positiven Werte k². Für uns sind besonders die Hyperbeln wichtig, die den Punkt O als deren Mittelpunkt haben und obiger Darstellungen seitlich liegen.
Die einzelnen Äste dieser Hyperbeln werden zunächst als „Zwischenhyperbeln
zum Zentrum” O bezeichnet. Ein derartiger Hyperbelast würde,
wenn er einer Weltlinie eines substanziellen Punktes entspräche, eine Bewegung
widerspiegeln, die für
In Anlehnung an den klassischen Vektorbegriff in einem Raum soll jetzt eine definierte
Strecke stellvertretend für alle Möglichkeiten
Einen solch beliebigen Vektor

Diese Bedingung legt fest, dass die Vektoren mit den Komponenten
Für die Beträge der Vektoren der unterschiedlichen Richtungen sollen
Einheitsgrößen festgelegt werden. Insofern soll einem raumartigen
Vektor vom Punkt O ausgehend, hin zum Bereich
Versetzten wir uns nun gedanklich in einen solchen Weltpunkt P
der durch seine Komponenten

Das Integral
Auf der Weltlinie sollen die Komponenten  bezeichnet. Der zweite Differentialquotient nach τ wird mit
bezeichnet. Der zweite Differentialquotient nach τ wird mit
 bezeichnet. Die dazugehörigen
Ableitungen des Vektors OP nach τ bezeichnen
wir als „Bewegungsvektor” im Punkt P, und die Ableitung
dieses Bewegungsvektors nach τ bezeichnen wir als
„Beschleunigungsvektor” im Punkt P. In diesem Fall
gilt:
bezeichnet. Die dazugehörigen
Ableitungen des Vektors OP nach τ bezeichnen
wir als „Bewegungsvektor” im Punkt P, und die Ableitung
dieses Bewegungsvektors nach τ bezeichnen wir als
„Beschleunigungsvektor” im Punkt P. In diesem Fall
gilt:


Das heißt, der Bewegungsvektor ist der zeitartige Vektor in Richtung der
Weltlinie im Punkt P mit dem
Bei näherer Betrachtung gibt es einen Hyperbelast, der mit der Weltlinie im Punkt P drei unendlich benachbarte Punkte hat. Und das dies die vom Vorkegel und Nachkegel erzeugten Asymptoten sind (siehe Abb. 3, nächstes Kap.). Diesen Hyperbelast bezeichnen wir fortan mit „Krümmungshyperbel” im Punkt P. Entspricht der Endpunkt M dem Zentrum dieser Hyperbel, so handelt es sich hierbei um eine Zwischenhyperbel ausgehend vom Zentrum M. Als Betrag des Vektors MP wählen wir ϱ, wobei man den Beschleunigungsvektor im Punkt P als den Vektor in Richtung MP mit dem Betrag c²/ϱ auffassen kann.
Sind die Komponenten
allesamt Null, so reduziert sich die Krümmungshyperbel
auf die im Punkt P die Weltlinie berührende Gerade,
woraufhin für ϱ = ∞ gilt.
⇦ Kapitel Kapitel ⇨