
Jetzt wollen wir die Einschränkung der Rotation um eine bestimmte Achse aufheben. Der starre Körper kann sich nun in allen Richtungen frei bewegen. An dieser Stelle sei bereits erwähnt, dass wir die Eulerschen Kreiselgleichungen nicht im Detail betrachten werden.
Dennoch wollen wir kurz untersuchen, wie sich bei einer beliebigen Rotation eines starren Körpers die Zusammenhänge darstellen. Jetzt geht es nicht mehr um eine feste Drehachse, sondern um eine Rotation um seinen Schwerpunkt. Dieser Schwerpunkt muss ein raumfester Punkt sein, ruhend in Bezug auf das Inertialsystem. Ansonsten gibt es keine weiteren Einschränkungen. Die Drehachse muss jedoch immer durch den Schwerpunkt durchgehen. Auch hier geht es um den Zusammenhang zwischen:
Hinweis: Wie wir bereits behandelt haben, ist diese Schreibweise die Kurzform der Matrizenschreibweise.
Vorweg kommt noch eine sehr wichtige Überlegung. Wenn man sich die Komponenten des Trägheitstensors anschaut, dann sind das ja Integrale über den ganzen starren Körper. Also über seine Volumen- bzw. Massenelemente. Nun ist es aber so, dass dieser starre Körper rotiert und zwar völlig frei im Raum. Nur sein Schwerpunkt bleibt fest.
Naheliegend wäre es jetzt, sich bei der Berechnung des Trägheitstensors auf
das raumfeste Koordinatensystem zu beziehen. Der ist ja verankert im Inertialsystem,
und dreht sich relativ zum betrachteten Körper. Dann würden alle seine
Komponenten
Zwar hat man mit dem raumfesten Koordinatensystem den Vorteil, dass bei fehlendem äußeren Drehmoment der Drehimpulsvektor raumfest bleibt. Aber das kann man nicht immer voraussetzen. Deshalb geht man jetzt so vor, dass man von dem raumfesten auf ein körperfestes Koordinatensystem übergeht. Hierzu macht man eine Transformation zu einem körperfesten Koordinatensystem. Welchen Vorteil hat das?
Wenn ein Koordinatenkreuz mit dem Körper verankert ist, und man sich die
Durchführung der Integrale über die Volumenelemente des Körpers bzw. die
Massenelemente betrachtet, dann ruhen sie nun relativ zum Körper. Damit erreicht man
jetzt, dass alle 9 Komponenten
Hinweis: Der Vektor der Winkelgeschwindigkeit, also das
 , soll nach wie vor, auch wenn man eine
solche Transformation durchführt, die Rotation dieses starren Körpers relativ
zum raumfesten System darstellen. Und der Drehimpulsvektor
, soll nach wie vor, auch wenn man eine
solche Transformation durchführt, die Rotation dieses starren Körpers relativ
zum raumfesten System darstellen. Und der Drehimpulsvektor
 soll genauso den Drehimpuls aus der
Sicht des raumfesten Koordinatensystems darstellen.
soll genauso den Drehimpuls aus der
Sicht des raumfesten Koordinatensystems darstellen.
Also der Körper rotiert wie gewohnt, relativ zum Inertialsystem. Und dieses rotierende System, an welches dieses körperfeste Koordinatensystem angehängt ist, ist auch kein Inertialsystem im Allgemeinen. Es ist nur eine Darstellung aller dieser Vektoren mit Hilfe eines anderen Koordinatenkreuzes. Die Vektoren als solche und auch der Tensor als solcher bleiben was sie sind.
Der Hauptzweck, warum man so vorgeht ist, damit in dieser Beziehung alle
Hier erkennt man schon, wie wichtig das Konzept der Tensorrechnung ist. Man kann auf
unterschiedliche Bezugssysteme wechseln. Tensoren (zweiter Stufe) sind einfach Matrizen,
mit dem richtigen Transformationsverhalten. Das heißt, die Komponenten
und
transformieren, wird letztlich
der Zusammenhang erhalten bleiben.
Jetzt lässt sich das aber noch weiter optimieren. Man hat zwar mit einem körperfesten Koordinatensystem schon viel gewonnen. Aber für reelle symmetrische Matrizen gibt es zusätzlich noch die Möglichkeit einer Hauptachsentransformation. Hierzu wählt man ein optimal gelegenes orthogonales Koordinatenkreuz innerhalb des betrachteten starren Körpers. Nach einer solchen Transformation ist das Hauptachsensystem schließlich so beschaffen, dass von dem Trägheitstensor nur mehr die Diagonalelemente übrig bleiben und alles andere Null wird.
Diese Vorgehensweise kennen wir bereits aus der Rotation um eine feste Drehachse. Im Allgemeinen hat man es ja mit symmetrischen Körpern zu tun. Und wenn ein Körper bezüglich einer bestimmten Achse symmetrisch ist, dann wird das mit Sicherheit eine der Hauptträgheitsachsen sein.
Daraus folgt, dass der Trägheitstensor nur noch drei Komponenten hat:
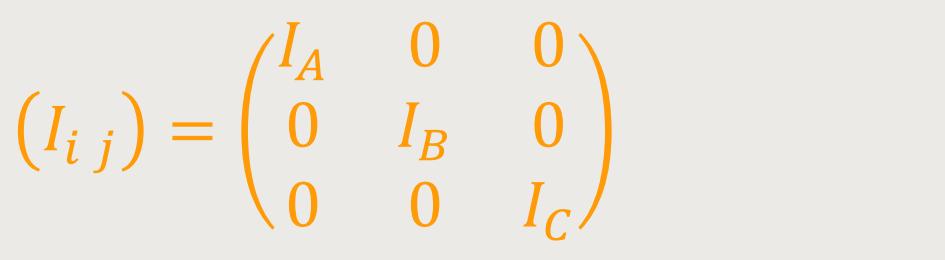
Und falls ein Körper nicht symmetrisch ist, gibt es trotzdem eine solche Hauptachsentransformation. Außerdem kann man durch Wahl der Achsen, nämlich welches die erste, die zweite und die dritte ist bestimmen, dass diese wie folgt angeordnet sind:
Das sind dann die Hauptträgheitsmomente eines beliebig geformten starren Körpers.
Wenn alle drei Trägheitsmomente unterschiedlich sind, handelt es sich in jedem Fall um einen „unsymmetrischen Körper”. Wenn zwei gleich sind, dann ist das ein „symmetrischer Kreisel”. Und wenn alle drei gleich sind, dann nennt man den Körper einen „Kugelkreisel”. Ein würfelförmiger Körper ist auch Kugelkreisel. Letztlich richtet sich alles nur danach, welche Form der Körper hat.
Insofern ist der Trägheitstensor charakteristisch für die entsprechende
Form und die Massenverteilung innerhalb eines Körpers. Was können wir jetzt
damit anfangen? Zunächst sei erwähnt, nur im Hauptachsensystem werden die
Hauptachsen mit
Und für den Drehimpulsvektor gilt:
Aus diesem Zusammenhang kann man bereits erkennen:
Damit liegt auf der Hand, dass man spezielle Drehachsen verwenden kann. In diesem Fall wählt man die Rotation um eine der Hauptträgheitsachsen.
Die Hauptträgheitsachsen sind körperfeste Achsen. Zum Beispiel kann ein Zylinder um die erste Hauptachse rotieren. „Ohne Beschränkung der Allgemeinheit wählen wir die Erste” (Redewendung aus der Mathematik):

Weil die Drehachse parallel zur

Das heißt, es gibt nur einen Drehimpulsvektor.
Wenn man den Trägheitstensor multipliziert mit dem Vektor der Winkelgeschwindigkeit kommt ein Vielfaches der Winkelgeschwindigkeit heraus:

So etwas nennt man auch eine „Eigenwertgleichung”. Wenn man einen Operator auf einen Vektor anwendet, kommt das Vielfache dieses Vektors heraus. In diesem speziellen Fall ist:

Wenn man also den Zylinder um seine Hauptachse drehen lässt, dann wird der
zugehörige Drehimpulsvektor auch in diese Richtung zeigen. Oder anders
ausgedrückt, der Drehimpulsvektor
verläuft in diesem Fall parallel
zum Winkelgeschwindigkeitsvektor
A.
Nun kommt noch ein weiterer Aspekt hinzu. Wir können jetzt auch die kinetische Energie für die Rotation dieses Körpers ausrechnen. Sie ist Allgemein definiert als:
Wie wir im vorherigen Kapitel gesehen haben, ist dies eine Doppelsumme. Aber in unserem speziellen Fall, nämlich im Hauptachsensystem, kommt heraus:

Das ist alles, was aus der Doppelsumme übrig bleibt. Es lässt sich durch Umformen auch wie folgt darstellen:
Damit erhält man eine wichtige Folgerung. Wenn man ein System mit konstantem Drehimpuls
betrachtet, also wenn kein äußeres Drehmoment vorhanden ist, dann wird das
₂
eine Konstante sein.
Und wann wird in diesem speziellen Fall die kinetische Energie T am kleinsten sein? Um welche Hauptachse muss sich der Körper dann drehen? In unserem Beispiel wäre das die Achse IC. Das wird für das System die stabilste Rotation sein, weil die energetisch niedrigste Situation immer die günstigste ist. Die stabilste Rotation ist die mit der kleinsten Energie. Das heißt, dass die stabilste Rotation die um die Achse des größten Trägheitsmoments verläuft.
Versuche mit verschiedenen Körpern zeigen, dass ein Körper der sich selbst überlassen ist, am liebsten stabil um die Achse des größten Trägheitsmoments rotiert, weil eine solche Rotation mit der kleinsten kinetischen Energie einhergeht.
⇦ Kapitel Kapitel ⇨