
In der nachfolgenden Betrachtung geht es darum, dass sich ein starrer Körper in irgendeiner Weise bewegt. Die Untersuchung translatorischer Bewegungen ist auf Dauer nicht besonders interessant. Denn dort verhält es sich nicht anders, wie bei Massenpunkten. Interessant wird es dagegen, wenn wir die Rotation näher beleuchten. Insofern werden wir jetzt die Translation völlig außer Acht lassen.
Wenn wir uns nun auf die Rotation beschränken, dann muss es an diesem starren Körper einen festgehaltenen Punkt geben. Durch diesen Punkt geht dann auch eine Drehachse, um die sich der Körper drehen kann. So könnte es zum Beispiel auch sein, dass der Körper während der Rotationsbewegung dauernd die Lage der Drehachse ändert. In Wirklichkeit spiralt oder taumelt der Körper irgendwie herum.
Es lässt sich schon erahnen, dass dies in der mathematischen Durchführung gar nicht so einfach ist. Wir werden hier auch nicht in alle Details der Kreiselmechanik einsteigen. Wer sich für diesen Bereich interessiert, sollte sich das Buch von Arnold Sommerfeld über die Kreiseldynamik zulegen.
Dennoch werden wir einige Aspekte betrachten, weil dieses Thema mit zu den Grundlagen der Mechanik gehört. Es kann nicht schaden zu verstehen, worauf es bei der Rotation von starren Körpern ankommt, und was man unter einem Trägheitsmoment versteht. Das sind Dinge, die auch in der Alltagswelt eine große Bedeutung haben und die für viele praktische Anwendungen wichtig sind.
Hierzu wählt man sich wieder ein orthonormales Bezugssystem  x,
y,
z
x,
y,
z . Wobei sich im Laufe der Zeit die
Drehachse während der Rotation
relativ zu dem ruhenden Inertialsystem zeitlich verändern kann.
. Wobei sich im Laufe der Zeit die
Drehachse während der Rotation
relativ zu dem ruhenden Inertialsystem zeitlich verändern kann.
Wie wir wissen, ist die Bewegung eines Massenelementes bzw. eines sich drehenden starren Körpers gegeben als:

Auf diese Beziehung sind wir schon des Öfteren gestoßen, und wir kennen sie insbesondere aus der Betrachtung der Kreisbewegung. Letzten Endes haben wir es bei der Rotation eines starren Körpers ständig mit einer Kreisbewegung zu tun. Denn jeder Massenpunkt dieses starren Körpers bewegt sich auf einer Kreisbahn. Es wird nur etwas komplizierter, wenn sich die Richtung des Winkelgeschwindigkeitsvektors während der Bewegung ändert.
Bei vorgegebenem Winkelgeschwindigkeitsvektor und Ortsvektor ergibt sich die Geschwindigkeit wie beschrieben. Man legt also den Ursprung des Koordinatensystems in den festgehaltenen Punkt des rotierenden starren Körpers. Das Koordinatensystem ist damit raumfest und ruht relativ zu dem Inertialsystem. Und relativ zum Inertialsystem rotiert dann auch der starre Körper.
Die Gleichung, die diese Rotation beschreibt, ist die Bewegungsgleichung und ist analog zu dem, was wir bereits aus der Punktmechanik für translatorische Bewegungen kennen. Dort wurde das Newton-Axiom betrachtet, dass nämlich die Kraft die Ursache einer zeitlichen Änderung des Impulses ist.
Bei der Rotation lautet jetzt die Gleichung:
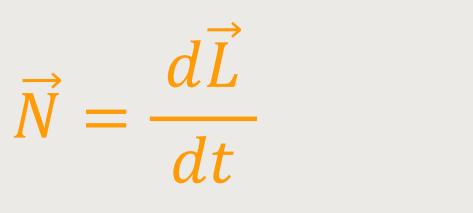
Das ist die Grundgleichung die es zu lösen gilt.
Zunächst geht es darum, eine Möglichkeit zu finden, den Drehimpuls leicht auszurechnen. Beim normalen Impuls war dies relativ einfach. Es wäre von Vorteil, wenn auch der Drehimpuls mit einer relevanten Geschwindigkeitsgröße zusammen hängt.
In ähnlicher Weise lässt sich sagen, was bei der Translation die
Geschwindigkeit ist, das ist bei der Rotation die Winkelgeschwindigkeit.
Man benötigt demnach einen Zusammenhang zwischen
 und
.
Bei der Translation ist die Situation so, dass der Impuls und die Geschwindigkeit immer
parallel zueinander sind. Daher genügt ein Faktor dazwischen
und
im Allgemeinen nicht parallel
zueinander sind. Dennoch lässt sich der Gesamtdrehimpuls eines starren
Körpers ausrechnen.
und
.
Bei der Translation ist die Situation so, dass der Impuls und die Geschwindigkeit immer
parallel zueinander sind. Daher genügt ein Faktor dazwischen
und
im Allgemeinen nicht parallel
zueinander sind. Dennoch lässt sich der Gesamtdrehimpuls eines starren
Körpers ausrechnen.
Der Gesamtdrehimpuls ist jetzt die Summe über die Einzeldrehimpulse aller Massenelemente dm aus denen der ganze starre Körper besteht. Hierzu integriert man über das gesamte Volumen:

 · dm
ist der Impuls des Massenelementes
· dm
ist der Impuls des Massenelementes
Eine Rechenregel aus der Vektorrechnung besagt:

Damit ergibt sich:

Was letztlich dabei herauskommt ist der Trägheitstensor. Wir werden weiter unten nochmals darauf eingehen.
Es gibt Beziehungen, die man am besten dadurch löst, indem man sie in Komponenten
aufschreibt. Denn obige Beziehung lässt sich nicht so ohne weiteres umformen. Deshalb
schreibt man die einzelnen Komponenten des Drehimpulsvektors der Reihe nach auf. Auf
diese Weise erhält man die Komponenten
In „Komponentenschreibweise” würde es zum Beispiel so aussehen:

Zunächst sieht das noch sehr unübersichtlich aus. Aber diese
Vorgehensweise ist notwendig, um anschließend weiter umformen zu können.
Die Idee ist dabei, dass man den Zusammenhang zwischen
und
herstellt.
Es wäre also schön, wenn es gelingt, aus der Beziehung das
herauszuholen.
Aus diesem Grund wird die Komponente L₁ so
formuliert, dass man Rechenfaktoren von
erhält. Dabei überlegt man
sich zunächst, welche Terme
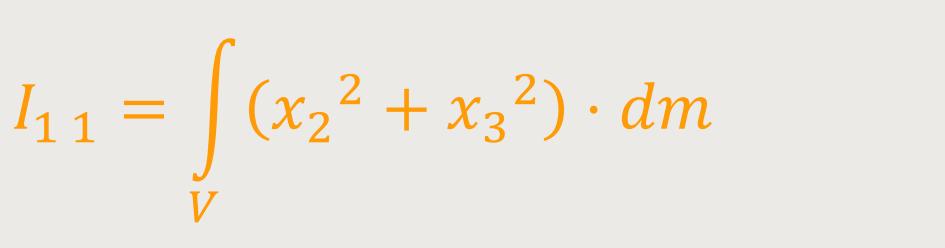
Nach der Umstellung von L₁ erhält man:
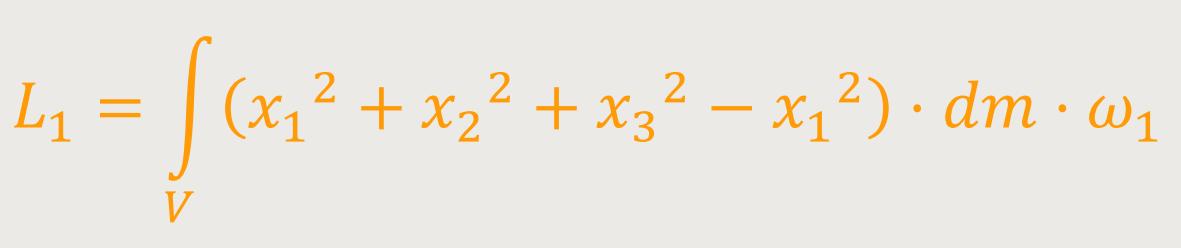
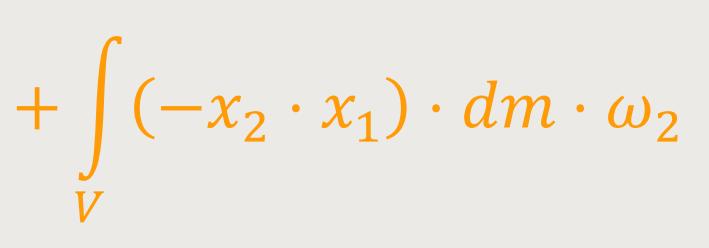
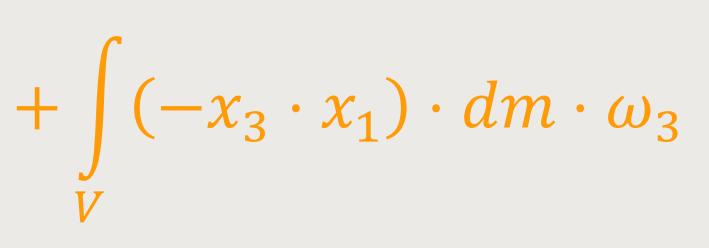
Hinweis: Der Winkelgeschwindigkeitsvektor
ist im gesamten Raum überall der
Gleiche. Somit ist er für die Integration über das Volumen des
Körpers eine Konstante und kann aus dem Intergral herausgeholt werden.
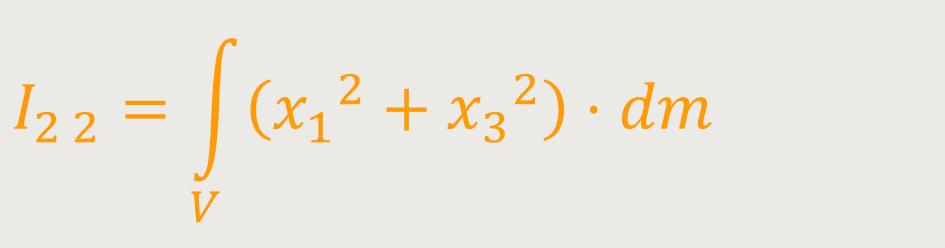
Analog ergibt sich für die zweite Komponente:

Nach der Umstellung von L₂ erhält man:

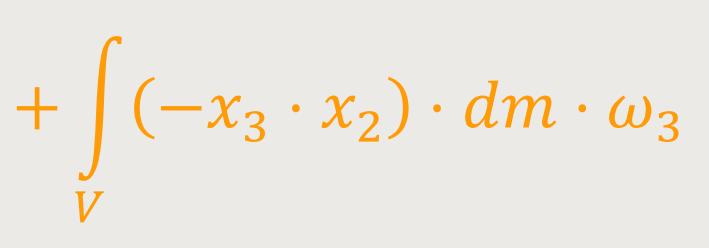
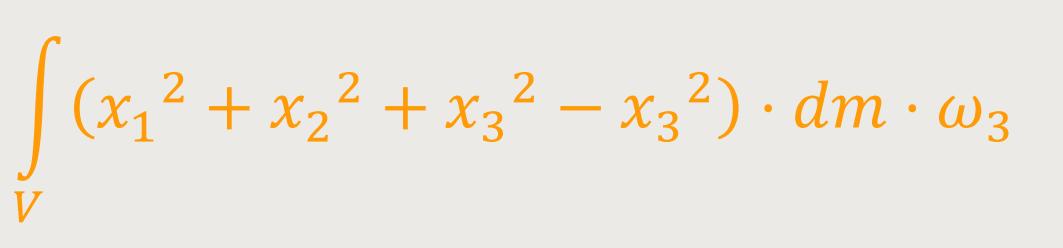
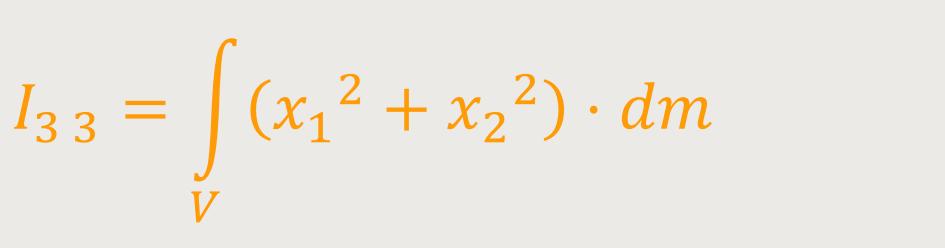
Analog ergibt sich für die dritte Komponente:

Nach der Umstellung von L₃ erhält man:

Hinweis: Mit obigen Integralen wird nur angedeutet, dass man den Körper in viele kleine Massenelemente zerlegt und auf alles aufsummiert. Ob es dann mathematische Methoden gibt, wie man das besonders geschickt machen kann, steht auf einem anderen Blatt.
Bei näherer Betrachtung kann man erkennen, dass sich die Integrale als Faktoren
herausbilden. Diese Rechenfaktoren ergeben sich alle durch Integration über
die entsprechende Form des Körpers. Wobei letztlich auch dessen Dichte eingehen kann,
wenn man statt
Nun liegt es nahe, die Matrizenschreibweise anzuwenden. Eine Matrix ist eine
quadratische Anordnung von Zahlen. Und in der Physik finden vor allen die
quadratischen Matrizen Anwendung. Da wir uns im
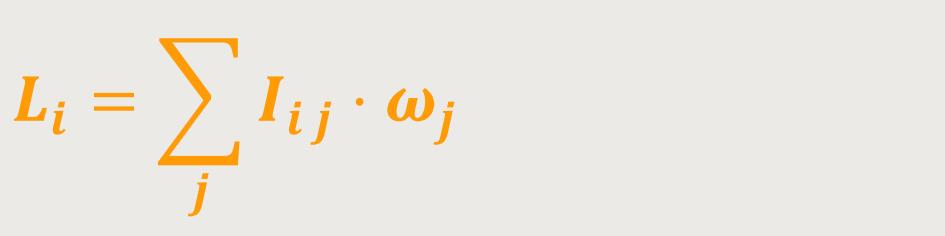
Alles, was man oben so aufwendig als Integrale geschrieben hat, kann man ganz einfach in Form einer „Matrize” darstellen. Dabei gilt für die I-Indizes: Erstes Indizes steht für die Zeile, zweites Indizes steht für die Spalte:

L₁, L₂ , L₃ sind die Komponenten des Drehimpulsvektors
Warum diese Vorgehensweise? Dazu muss man wissen, wie man eine Matrix
L1 = Erste Zeile (Matrix) ∗ letzte Spalte (Faktor)
L2 = Zweite Zeile (Matrix) ∗ letzte Spalte (Faktor)
L3 = Dritte Zeile (Matrix) ∗ letzte Spalte (Faktor)
Daraus folgt:



Die Physiker sind im Allgemeinen daran interessiert, alles so effizient wie möglich aufzuschreiben. Noch kürzer lässt sich das in der bereits erwähnten Tensor-Schreibweise darlegen.
In der „Tensor-Schreibweise” stellt man die i-te Komponente des Drehimpulsvektors heraus:
Hier ist „i” ein frei zu wählender Index.
Zum Beispiel wählt man



Diese Schreibweise ist für Physiker noch nicht kurz genug. Wenn bei Indexschreibweisen und Gleichungen Summen vorkommen, schreibt man diese gar nicht hin. Und wenn in einem Produkt von zwei indizierten Größen zwei Indizes gleich sind, bedeutet das wiederum, dass über die Indizes von 1 bis zur Dimensionszahl (hier 3) summiert wird.
Alles, was man oben aufwendig formuliert hat, lässt sich dann durch eine einfache Beziehung ausdrücken:

Wenn man eine solche Schreibweise sieht, bei der in einem Produkt zwei Indizes als gleich bezeichnet sind, dann summiert man über sie, indem man sich das Summenzeichen wieder hinzu denkt. Das Summenzeichen bleibt nach wie vor wirksam, es wird nur vereinfacht ausgedrückt.
Natürlich lässt sich das auch anders formulieren:
In der Matrix-Schreibweise lautet dies:
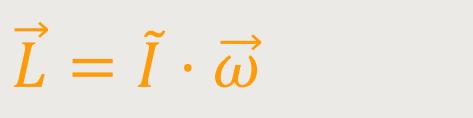
Dieser Ausdruck  steht für die
gesamte Matrix. Und die 3·3 Matrix ist der
Trägheitstensor. In der gesamten Matrix sind die Trägheitsmomente und die
Richtmomente enthalten.
steht für die
gesamte Matrix. Und die 3·3 Matrix ist der
Trägheitstensor. In der gesamten Matrix sind die Trägheitsmomente und die
Richtmomente enthalten.
Und damit erhält man jetzt einen Zusammenhang zwischen
und
.
Ii j ist der Trägheitstensor
I₁ ₁ ,
I₁ ₂ und
I₁ ₃ sind die Trägheitsmomente
(Elemente in der Hauptdiagonale der Matrix)
I₁ ₂ ,
I₁ ₃ und
I₂ ₃ sind die sogenannten
Richtmomente oder Trägheitsprodukte.
Ein Vergleich mit dem bisher Erarbeiteten ergibt folgendes für die Trägheitsmomente:
Und für die Trägheitsprodukte folgt daraus:
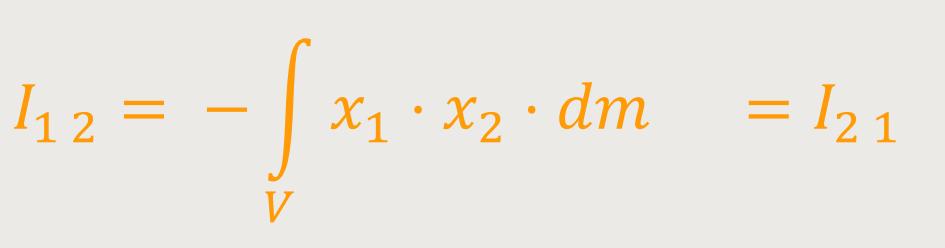

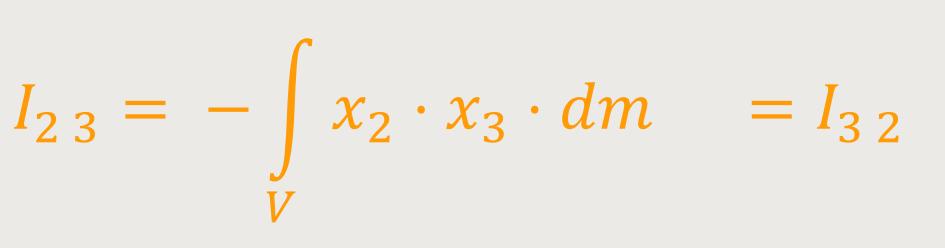
Und damit erkennt man sofort, dass der Trägheitstensor symmetrisch ist. Das heißt, man benötigt gar nicht alle neun, es genügen sechs.
⇦ Kapitel Kapitel ⇨